Dr. Yijiong Lin
![]() : yijiong {dot} lin {at} bristol {dot} ac {dot} uk
: yijiong {dot} lin {at} bristol {dot} ac {dot} uk

I am a Postdoctoral Research Associate at the Bristol Robotics Laboratory, University of Bristol, UK. I am currently working on the ARIA-funded project ‘Democratising Co-Design of Hardware and Control for Robot Dexterity’ project in the Robot Dexterity program, led by Prof. Nathan Lepora and Prof. Edward Johns (Imeprial College London). My research focuses on developing multimodal sensing and sim-to-real deep reinforcement learning methods for dexterous robotic manipulation. I recieved my Ph.D. degree in Engineering Mathematics in 2025 from the University of Bristol, UK, under the supervision of Prof. Nathan Lepora, Dr. Efi Psomopoulou, and Dr. Dandan Zhang.
In my free time, you can catch me playing badminton, swimming, or exploring urban and natural views with my lovely camera (some selections). I’m also a cat person. ![]()
News
- [26/04] Our paper NeuralTouch: Neural Descriptors for Precise Sim-to-Real Tactile Robot Control has been accepted for publication in IEEE/ASME Transactions on Mechatronics.

- [26/02] I am serving as a co-organizer for the ICRA 2026 ViTac Workshop: Learning to See and Feel: Vision-Tactile Synergy for Embodied AI.
- [25/10] Our NeuralTouch paper was selected as a Best Paper Award Finalist at the IROS 2025 Workshop on Tactile Sensing Towards Robot Dexterity and Intelligence.
- [25/08] Two papers have been accepted at the Conference on Robot Learning (CoRL) 2025.
- [25/04] I passed my PhD viva (defense)! I am grateful to my supervisors, Prof. Nathan Lepora, Prof. Efi Psomopoulou and Prof. Dandan Zhang, for their guidance and support throughout my doctoral journey. I also appreciate the support from the Viva Chair Prof. Jonathan Rossiter and the valuable feedback from my examiners, Prof. Shan Luo and Prof. Hongbin Liu.
- [25/01] I presented our peer-reviewed work on NeuralTouch at the 6th UK Robot Manipulation Workshop, held at King’s College London (KCL), UK, from January 7 to 8, 2025.
- [24/12] Our paper “Coarse-to-Fine Robotic Pushing Using Touch, Vision and Proprioception” has been accepted for publication in IEEE Robotics and Automation Letters (RA-L).
- [24/12] I am excited to continue my research in the field of robotics as a Postdoctoral Researcher at the University of Bristol, Bristol Robotics Lab, UK.
- [24/11] Our paper “Snap-it, Tap-it, Splat-it: Tactile-Informed 3D Gaussian Splatting for Reconstructing Challenging Surfaces” has been accepted at the 12th International Conference on 3D Vision (3DV) 2025.
- [24/09] Our paper “Anyrotate: Gravity-invariant in-hand object rotation with sim-to-real touch” is accepted at the Conference on Robot Learning (CoRL) 2024.
- [24/06] I visited the LASR lab at Technische Universität Dresden in Germany from June 10 to 12, 2024, where I presented all research work conducted during my doctoral period and engage in academic discussions with Professor Roberto Calandra and his students.
- [24/05] I attended the 2024 IEEE International Conference on Robotics and Automation (ICRA) in Yokohama, Japan, where I presented our work on Bi-Touch.
- [24/04] Our paper “Touchsdf: A deepsdf approach for 3d shape reconstruction using vision-based tactile sensing” has been accepted for publication in IEEE Robotics and Automation Letters (RA-L).
- [24/01] Our work on Tactile Saliency got nominated as the Best Workshop Poster at the 5th UK Robot Manipulation Workshop.
- [23/12] Our work Bi-Touch received the Best Workshop Poster at the NeurIPS 1st Touch Processing Workshop.
- [23/10] We are presentinig our work Tactile Saliency at IROS 2023 in Detroit, U.S.!
- [23/10] We are pleased to announce that the code for our Bi-Touch paper has been open-sourced!
- [23/07] Our poster about Attention of Robot Touch was presented at the International Robotics Showcase 2023 in Bristol, UK.
- [23/07] Our work on Bi-Touch: Bimanual Tactile Manipulation with Sim-to-Real Deep Reinforcement Learning got accepted by RA Letter. Checkout our website!
- [23/06] Our work on Sim-to-Real Model-Based and Model-Free Deep Reinforcement Learning for Tactile Pushing got accepted by RA Letter.
- [23/06] Our work on Tactile Saliency Prediction for Robust Sim-to-Real Tactile Control got accepted by IROS 2023. (Website)
- [23/06] I presented our poster at the ICRA 2023 ViTac Workshop in London, UK.
- [23/04] Our poster on Attention of Robotic Touch was accepted after single-blind review at the ICRA 2023 ViTac Workshop: Blending Virtual and Real Visuo-Tactile Perception.
- [23/01] Our poster of bimanual tactile robotic system got nominated as the best posters award at the 4th UK Robot Manipulation Workshop.
- [22/10] I presented our paper in IROS 2022 in Kyoto, Japan.
- [22/09] Our paper got nominated as the best student paper award at the 27th IEEE International Conference on Automation and Computing (ICAC2022).
- [22/08] We released the code for our Tactile Gym 2.0 paper (RAL/IROS 2022).
- [22/07] We have two papers got accepted by RAL/IROS 2022.
- [22/06] I presented a poster on Tactile Gym 2.0 in the 1st Bristol RL Symposium, Bristol, UK.
- [21/11] We presented our work on “Dexterous Robot Control Using Deep Learning and Biomimetic Touch” at the 5th Conference on Robot Learning (CoRL) in London, UK.
- [21/05] Our paper got accepted by RSS 2021.
- [20/12] I started my dotoral programme in Robot Learning at the University of Bristol supervised by Prof. Nathan Lepora in Bristol, UK.

- [19/12] Our paper got accepted by RAL/IROS 2020.
- [19/12] I presented our work in the 33rd Conference on Neural Information Processing Systems (NeurIPS) workshop on Robot Learning in Vancouver, Canada.
- [19/08] We gave a tutorial on “Introduction to Deep Reinforcement Learning” in 2019 IEEE International Conference on Real-time Computing and Robotics (RCAR), Irkutsk, Russia
- [19/07] I had a 2-week visit to the University of Michigan – Shanghai Jiao Tong University Joint Institute where I performed research collaboration with Prof. Paul Weng and Dr. Matthieu Zimmer in Deep Reinforcement Learning, Shanghai, China,
- [18/12] I presented our paper in 2018 IEEE International Conference on Robotics and Biomimetics (ROBIO) in Kuala Lumpur, Malaysia.
Papers
-
 NeuralTouch: Neural Descriptors for Precise Sim-to-Real Tactile Robot ControlIEEE/ASME Transactions on Mechatronics (TMECH), 2026Accepted
NeuralTouch: Neural Descriptors for Precise Sim-to-Real Tactile Robot ControlIEEE/ASME Transactions on Mechatronics (TMECH), 2026Accepted -
-
 SimShear: Sim-to-Real Shear-based Tactile Servoing9th Annual Conference on Robot Learning (CoRL), 2025
SimShear: Sim-to-Real Shear-based Tactile Servoing9th Annual Conference on Robot Learning (CoRL), 2025 -
 Text2Touch: Tactile In-Hand Manipulation with LLM-Designed Reward Functions9th Annual Conference on Robot Learning (CoRL), 2025
Text2Touch: Tactile In-Hand Manipulation with LLM-Designed Reward Functions9th Annual Conference on Robot Learning (CoRL), 2025 -
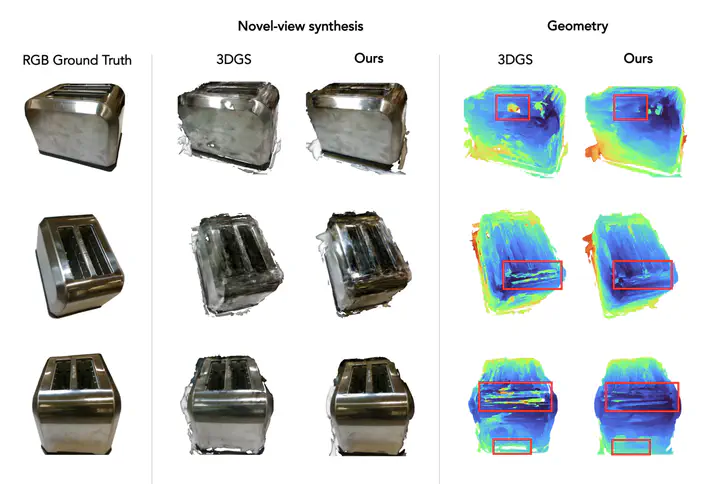 Snap-it, tap-it, splat-it: Tactile-informed 3d gaussian splatting for reconstructing challenging surfacesInternational Conference on 3D Vision, 2025
Snap-it, tap-it, splat-it: Tactile-informed 3d gaussian splatting for reconstructing challenging surfacesInternational Conference on 3D Vision, 2025 -
 Anyrotate: Gravity-invariant in-hand object rotation with sim-to-real touch8th Annual Conference on Robot Learning (CoRL), 2024
Anyrotate: Gravity-invariant in-hand object rotation with sim-to-real touch8th Annual Conference on Robot Learning (CoRL), 2024 -
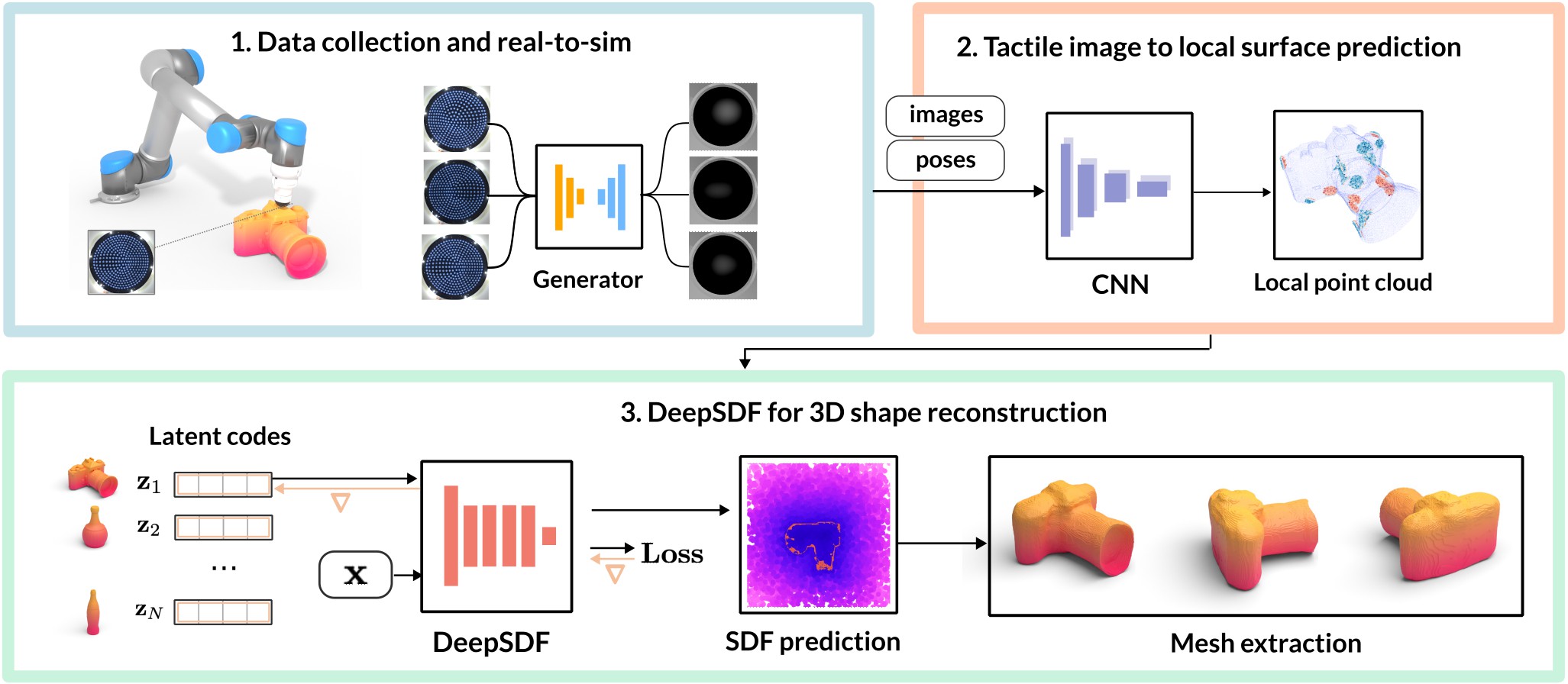 Touchsdf: A deepsdf approach for 3d shape reconstruction using vision-based tactile sensingIEEE Robotics and Automation Letters (RA-L), 2024
Touchsdf: A deepsdf approach for 3d shape reconstruction using vision-based tactile sensingIEEE Robotics and Automation Letters (RA-L), 2024 -
 Coarse-to-fine Robotic Pushing using Touch, Vision and ProprioceptionIEEE Robotics and Automation Letters (RA-L), 2025
Coarse-to-fine Robotic Pushing using Touch, Vision and ProprioceptionIEEE Robotics and Automation Letters (RA-L), 2025 -
 Sim-to-real model-based and model-free deep reinforcement learning for tactile pushingIEEE Robotics and Automation Letters (RA-L), 2023
Sim-to-real model-based and model-free deep reinforcement learning for tactile pushingIEEE Robotics and Automation Letters (RA-L), 2023 -
 Probabilistic Discriminative Models address the Tactile Perceptual Aliasing ProblemIn Robotics: Science and Systems (RSS), Jul 2021
Probabilistic Discriminative Models address the Tactile Perceptual Aliasing ProblemIn Robotics: Science and Systems (RSS), Jul 2021