Dr. Yijiong Lin
![]() : yijiong {dot} lin {at} bristol {dot} ac {dot} uk
: yijiong {dot} lin {at} bristol {dot} ac {dot} uk

林一炯,博士,英国布里斯托大学 Bristol Robotics Laboratory 博士后研究员。目前参与 英国基金委ARIA 资助的项目 Democratising Co-Design of Hardware and Control for Robot Dexterity,该项目属于 Robot Dexterity program,由 Prof. Nathan Lepora 和 Prof. Edward Johns(Imperial College London)领导。研究方向包括多模态感知、仿真到现实迁移以及面向灵巧机器人操作的深度强化学习方法。林一炯于 2025 年在英国 University of Bristol 获得 Engineering Mathematics 博士学位,导师为 Prof. Nathan Lepora、Dr. Efi Psomopoulou 和 Dr. Dandan Zhang。
业余爱好:羽毛球、游泳,喜欢带着相机探索城市与自然风景(一些照片);也是一名猫派人士。![]()
动态
- [26/04] 我们的论文 NeuralTouch: Neural Descriptors for Precise Sim-to-Real Tactile Robot Control 已被 IEEE/ASME Transactions on Mechatronics 接收发表。

- [26/02] 我将担任 ICRA 2026 ViTac Workshop: Learning to See and Feel: Vision-Tactile Synergy for Embodied AI 的联合组织者。
- [25/10] 我们的 NeuralTouch paper 入选 IROS 2025 Workshop on Tactile Sensing Towards Robot Dexterity and Intelligence 的 Best Paper Award Finalist。
- [25/08] 两篇论文被 Conference on Robot Learning (CoRL) 2025 接收。
- [25/04] 我通过了博士答辩!感谢我的导师 Prof. Nathan Lepora、Prof. Efi Psomopoulou 和 Prof. Dandan Zhang 在博士阶段给予的指导与支持。也感谢 Viva Chair Prof. Jonathan Rossiter 的支持,以及考官 Prof. Shan Luo 和 Prof. Hongbin Liu 提供的宝贵反馈。
- [25/01] 我在英国 King’s College London (KCL) 举办的 6th UK Robot Manipulation Workshop 展示了经过同行评审的 NeuralTouch 工作,会议时间为 2025 年 1 月 7 日至 8 日。
- [24/12] 我们的论文 “Coarse-to-Fine Robotic Pushing Using Touch, Vision and Proprioception” 已被 IEEE Robotics and Automation Letters (RA-L) 接收发表。
- [24/12] 我很高兴继续在机器人领域开展研究,并加入英国 University of Bristol, Bristol Robotics Lab 担任 Postdoctoral Researcher。
- [24/11] 我们的论文 “Snap-it, Tap-it, Splat-it: Tactile-Informed 3D Gaussian Splatting for Reconstructing Challenging Surfaces” 被 12th International Conference on 3D Vision (3DV) 2025 接收。
- [24/09] 我们的论文 “Anyrotate: Gravity-invariant in-hand object rotation with sim-to-real touch” 被 Conference on Robot Learning (CoRL) 2024 接收。
- [24/06] 我于 2024 年 6 月 10 日至 12 日访问了德国 Technische Universitat Dresden 的 LASR lab,展示了博士期间的全部研究工作,并与 Professor Roberto Calandra 及其学生进行了学术交流。
- [24/05] 我参加了日本 Yokohama 的 2024 IEEE International Conference on Robotics and Automation (ICRA),并展示了我们的工作 Bi-Touch。
- [24/04] 我们的论文 “Touchsdf: A deepsdf approach for 3d shape reconstruction using vision-based tactile sensing” 已被 IEEE Robotics and Automation Letters (RA-L) 接收发表。
- [24/01] 我们的工作 Tactile Saliency 在 5th UK Robot Manipulation Workshop 获得 Best Workshop Poster 提名。
- [23/12] 我们的工作 Bi-Touch 在 NeurIPS 1st Touch Processing Workshop 获得 Best Workshop Poster。
- [23/10] 我们正在美国 Detroit 的 IROS 2023 展示工作 Tactile Saliency。
- [23/10] 我们很高兴宣布,Bi-Touch 论文的代码已经开源。
- [23/07] 我们关于 Attention of Robot Touch 的海报在英国 Bristol 的 the International Robotics Showcase 2023 展出。
- [23/07] 我们的工作 Bi-Touch: Bimanual Tactile Manipulation with Sim-to-Real Deep Reinforcement Learning 被 RA Letter 接收。欢迎查看我们的网站。
- [23/06] 我们的工作 Sim-to-Real Model-Based and Model-Free Deep Reinforcement Learning for Tactile Pushing 被 RA Letter 接收。
- [23/06] 我们的工作 Tactile Saliency Prediction for Robust Sim-to-Real Tactile Control 被 IROS 2023 接收。 (Website)
- [23/06] 我在英国 London 的 ICRA 2023 ViTac Workshop 展示了我们的海报。
- [23/04] 我们关于 Attention of Robotic Touch 的海报通过单盲评审,被 the ICRA 2023 ViTac Workshop: Blending Virtual and Real Visuo-Tactile Perception 接收。
- [23/01] 我们关于双臂触觉机器人系统的海报在 the 4th UK Robot Manipulation Workshop 获得最佳海报奖提名。
- [22/10] 我在日本 Kyoto 的 IROS 2022 展示了我们的论文。
- [22/09] 我们的论文在 the 27th IEEE International Conference on Automation and Computing (ICAC2022) 获得最佳学生论文奖提名。
- [22/08] 我们发布了 Tactile Gym 2.0 paper (RAL/IROS 2022) 的代码。
- [22/07] 我们有两篇论文被 RAL/IROS 2022 接收。
- [22/06] 我在英国 Bristol 的 1st Bristol RL Symposium 展示了关于 Tactile Gym 2.0 的海报。
- [21/11] 我们在英国 London 的 the 5th Conference on Robot Learning (CoRL) 展示了工作 “Dexterous Robot Control Using Deep Learning and Biomimetic Touch”。
- [21/05] 我们的论文被 RSS 2021 接收。
- [20/12] 我在英国 Bristol 的 University of Bristol 开始了 Robot Learning 方向的博士项目,导师为 Prof. Nathan Lepora。

- [19/12] 我们的论文被 RAL/IROS 2020 接收。
- [19/12] 我在加拿大 Vancouver 的 33rd Conference on Neural Information Processing Systems (NeurIPS) workshop on Robot Learning 展示了我们的工作。
- [19/08] 我们在俄罗斯 Irkutsk 的 2019 IEEE International Conference on Real-time Computing and Robotics (RCAR) 上做了 “Introduction to Deep Reinforcement Learning” 教程。
- [19/07] 我访问了 University of Michigan - Shanghai Jiao Tong University Joint Institute 两周,并与 Prof. Paul Weng 和 Dr. Matthieu Zimmer 在 Deep Reinforcement Learning 方向开展研究合作,地点为中国 Shanghai。
- [18/12] 我在马来西亚 Kuala Lumpur 举办的 2018 IEEE International Conference on Robotics and Biomimetics (ROBIO) 上展示了我们的论文。
论文
-
 TactileLab: Efficient Multimodal Tactile Simulation for Shear-Sensitive Dexterous Sim2Real Robotic ManipulationarXiv, Jul 2026Coming soon
TactileLab: Efficient Multimodal Tactile Simulation for Shear-Sensitive Dexterous Sim2Real Robotic ManipulationarXiv, Jul 2026Coming soon -
-
 SimShear: Sim-to-Real Shear-based Tactile Servoing9th Annual Conference on Robot Learning (CoRL), Jul 2025
SimShear: Sim-to-Real Shear-based Tactile Servoing9th Annual Conference on Robot Learning (CoRL), Jul 2025 -
 Text2Touch: Tactile In-Hand Manipulation with LLM-Designed Reward Functions9th Annual Conference on Robot Learning (CoRL), Jul 2025
Text2Touch: Tactile In-Hand Manipulation with LLM-Designed Reward Functions9th Annual Conference on Robot Learning (CoRL), Jul 2025 -
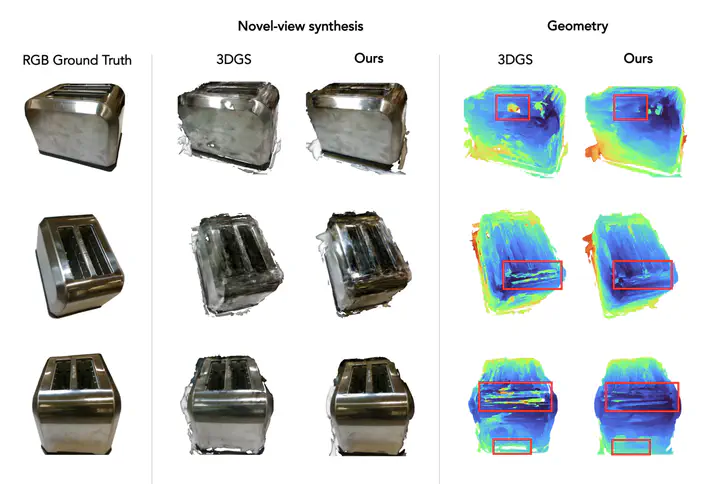 Snap-it, tap-it, splat-it: Tactile-informed 3d gaussian splatting for reconstructing challenging surfacesInternational Conference on 3D Vision, Jul 2025
Snap-it, tap-it, splat-it: Tactile-informed 3d gaussian splatting for reconstructing challenging surfacesInternational Conference on 3D Vision, Jul 2025 -
 Anyrotate: Gravity-invariant in-hand object rotation with sim-to-real touch8th Annual Conference on Robot Learning (CoRL), Jul 2024
Anyrotate: Gravity-invariant in-hand object rotation with sim-to-real touch8th Annual Conference on Robot Learning (CoRL), Jul 2024 -
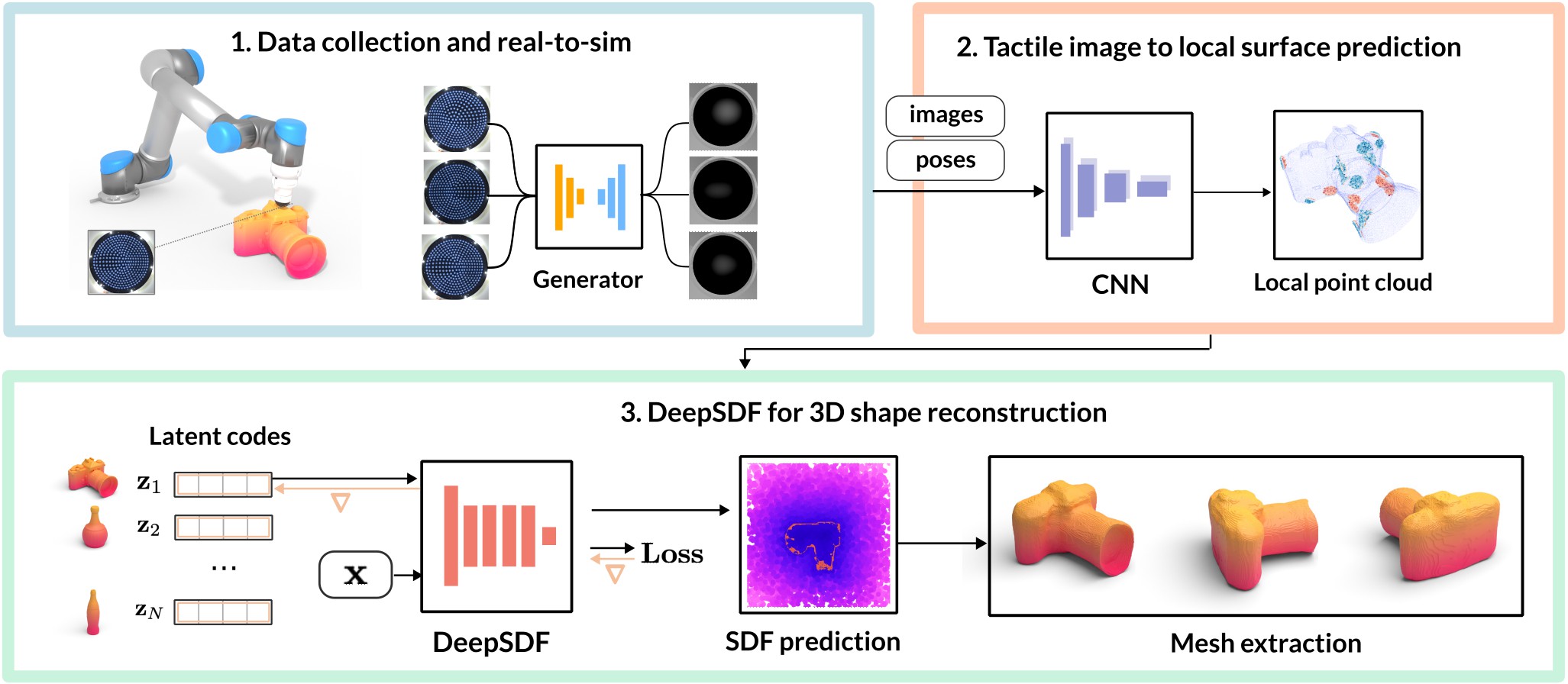 Touchsdf: A deepsdf approach for 3d shape reconstruction using vision-based tactile sensingIEEE Robotics and Automation Letters (RA-L), Jul 2024
Touchsdf: A deepsdf approach for 3d shape reconstruction using vision-based tactile sensingIEEE Robotics and Automation Letters (RA-L), Jul 2024 -
 Coarse-to-fine Robotic Pushing using Touch, Vision and ProprioceptionIEEE Robotics and Automation Letters (RA-L), Jul 2025
Coarse-to-fine Robotic Pushing using Touch, Vision and ProprioceptionIEEE Robotics and Automation Letters (RA-L), Jul 2025 -
 Sim-to-real model-based and model-free deep reinforcement learning for tactile pushingIEEE Robotics and Automation Letters (RA-L), Jul 2023
Sim-to-real model-based and model-free deep reinforcement learning for tactile pushingIEEE Robotics and Automation Letters (RA-L), Jul 2023 -
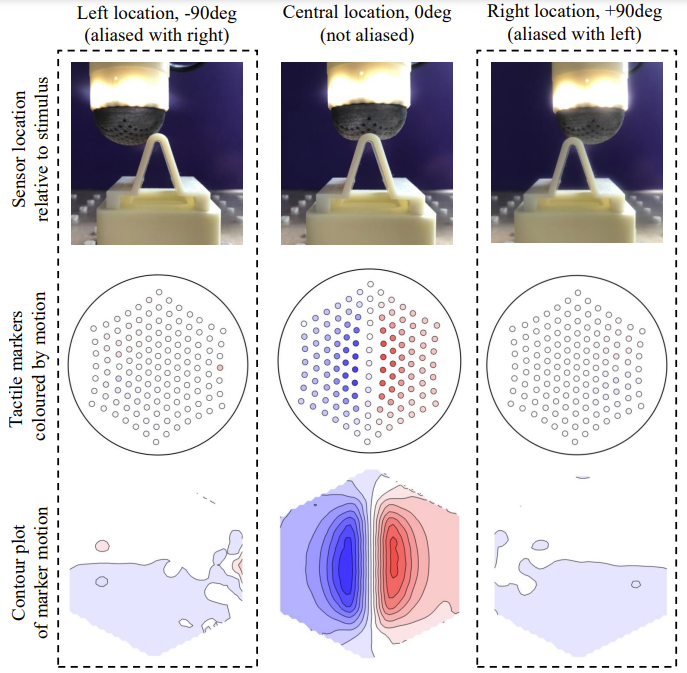 Probabilistic Discriminative Models address the Tactile Perceptual Aliasing ProblemIn Robotics: Science and Systems (RSS), Jul 2021
Probabilistic Discriminative Models address the Tactile Perceptual Aliasing ProblemIn Robotics: Science and Systems (RSS), Jul 2021