论文
如需查看更新的论文信息,请访问我的 Google Scholar 。
Papers
2026
-
 TactileLab: Efficient Multimodal Tactile Simulation for Shear-Sensitive Dexterous Sim2Real Robotic ManipulationarXiv, 2026Coming soon
TactileLab: Efficient Multimodal Tactile Simulation for Shear-Sensitive Dexterous Sim2Real Robotic ManipulationarXiv, 2026Coming soon
2025
-
-
 SimShear: Sim-to-Real Shear-based Tactile Servoing9th Annual Conference on Robot Learning (CoRL), 2025
SimShear: Sim-to-Real Shear-based Tactile Servoing9th Annual Conference on Robot Learning (CoRL), 2025 -
 Text2Touch: Tactile In-Hand Manipulation with LLM-Designed Reward Functions9th Annual Conference on Robot Learning (CoRL), 2025
Text2Touch: Tactile In-Hand Manipulation with LLM-Designed Reward Functions9th Annual Conference on Robot Learning (CoRL), 2025 -
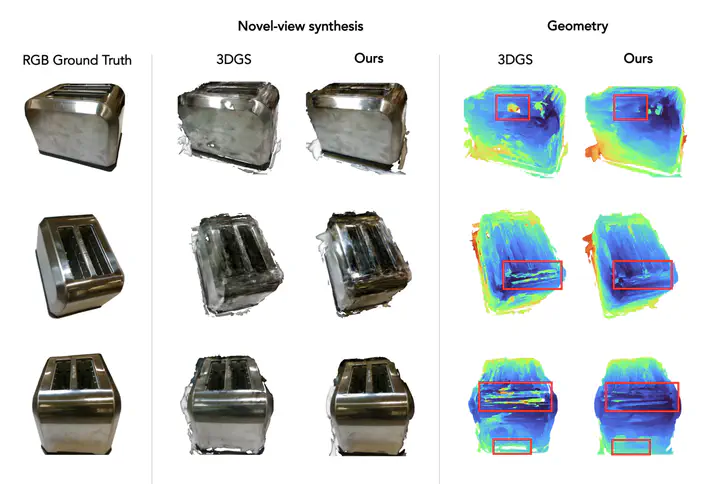 Snap-it, tap-it, splat-it: Tactile-informed 3d gaussian splatting for reconstructing challenging surfacesInternational Conference on 3D Vision, 2025
Snap-it, tap-it, splat-it: Tactile-informed 3d gaussian splatting for reconstructing challenging surfacesInternational Conference on 3D Vision, 2025 -
 Coarse-to-fine Robotic Pushing using Touch, Vision and ProprioceptionIEEE Robotics and Automation Letters (RA-L), 2025
Coarse-to-fine Robotic Pushing using Touch, Vision and ProprioceptionIEEE Robotics and Automation Letters (RA-L), 2025
2024
-
 Anyrotate: Gravity-invariant in-hand object rotation with sim-to-real touch8th Annual Conference on Robot Learning (CoRL), 2024
Anyrotate: Gravity-invariant in-hand object rotation with sim-to-real touch8th Annual Conference on Robot Learning (CoRL), 2024 -
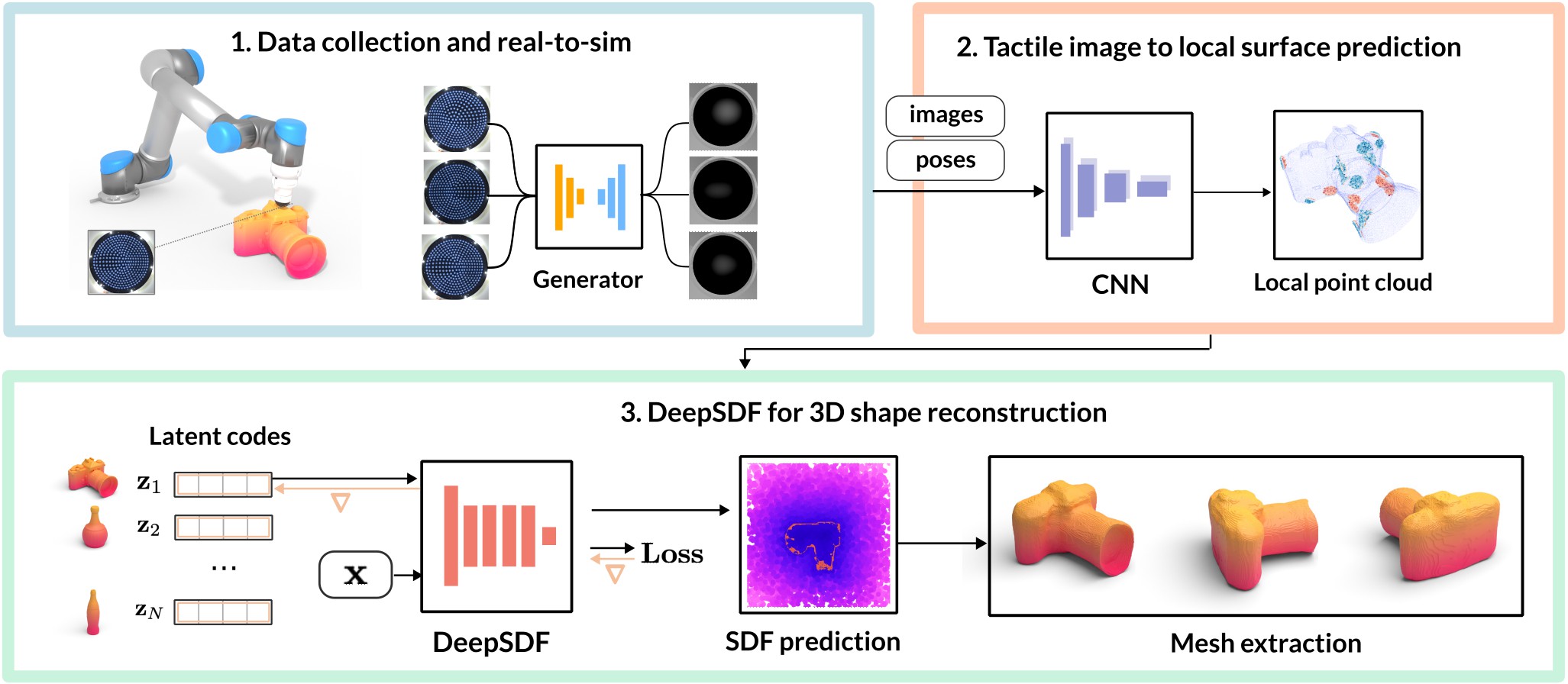 Touchsdf: A deepsdf approach for 3d shape reconstruction using vision-based tactile sensingIEEE Robotics and Automation Letters (RA-L), 2024
Touchsdf: A deepsdf approach for 3d shape reconstruction using vision-based tactile sensingIEEE Robotics and Automation Letters (RA-L), 2024
2023
-
 Sim-to-real model-based and model-free deep reinforcement learning for tactile pushingIEEE Robotics and Automation Letters (RA-L), 2023
Sim-to-real model-based and model-free deep reinforcement learning for tactile pushingIEEE Robotics and Automation Letters (RA-L), 2023
2022
- ICACGraph Neural Networks for Interpretable Tactile SensingIn 27th International Conference on Automation and Computing (ICAC), Aug 2022
2021
-
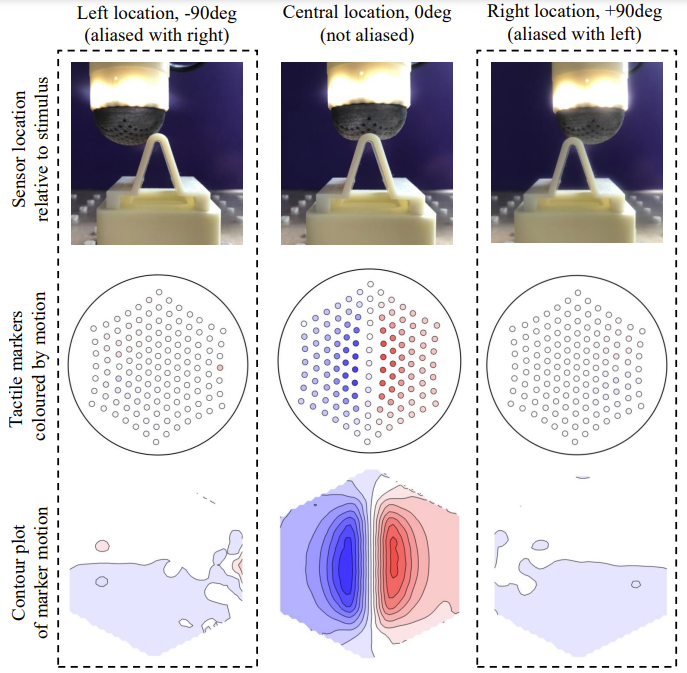 Probabilistic Discriminative Models address the Tactile Perceptual Aliasing ProblemIn Robotics: Science and Systems (RSS), Jul 2021
Probabilistic Discriminative Models address the Tactile Perceptual Aliasing ProblemIn Robotics: Science and Systems (RSS), Jul 2021
2020
- ICIRAVariational Augmented the Heuristic Funnel-Transitions Model for Dexterous Robot ManipulationIn International Conference on Intelligent Robotics and Applications, Jul 2020
2019
2018
- ROBIOAn Odd-Form Electronic Component Insertion System Based on Dual SCARAIn 2018 IEEE International Conference on Robotics and Biomimetics (ROBIO), Dec 2018
- ROBIOA Less-Dependent Threshold Corner Detection AlgorithmIn 2018 IEEE International Conference on Robotics and Biomimetics (ROBIO), Dec 2018